
Research Projects
Artificial lateral line fusion sensing technology for robotic blind fish
Project Leader
The first bionic robotic blind fish (to be published) 仿洞穴盲鱼机器鱼(敬请期待哦)
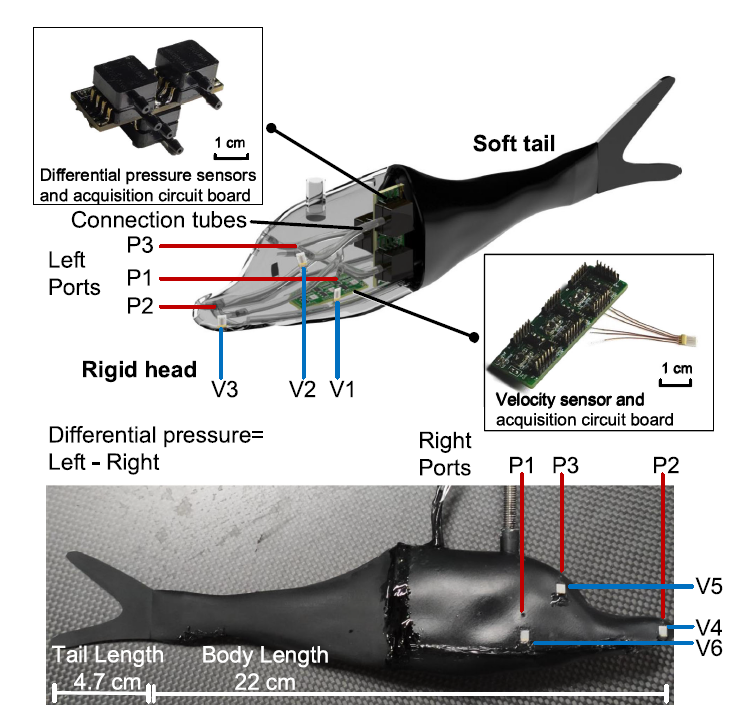
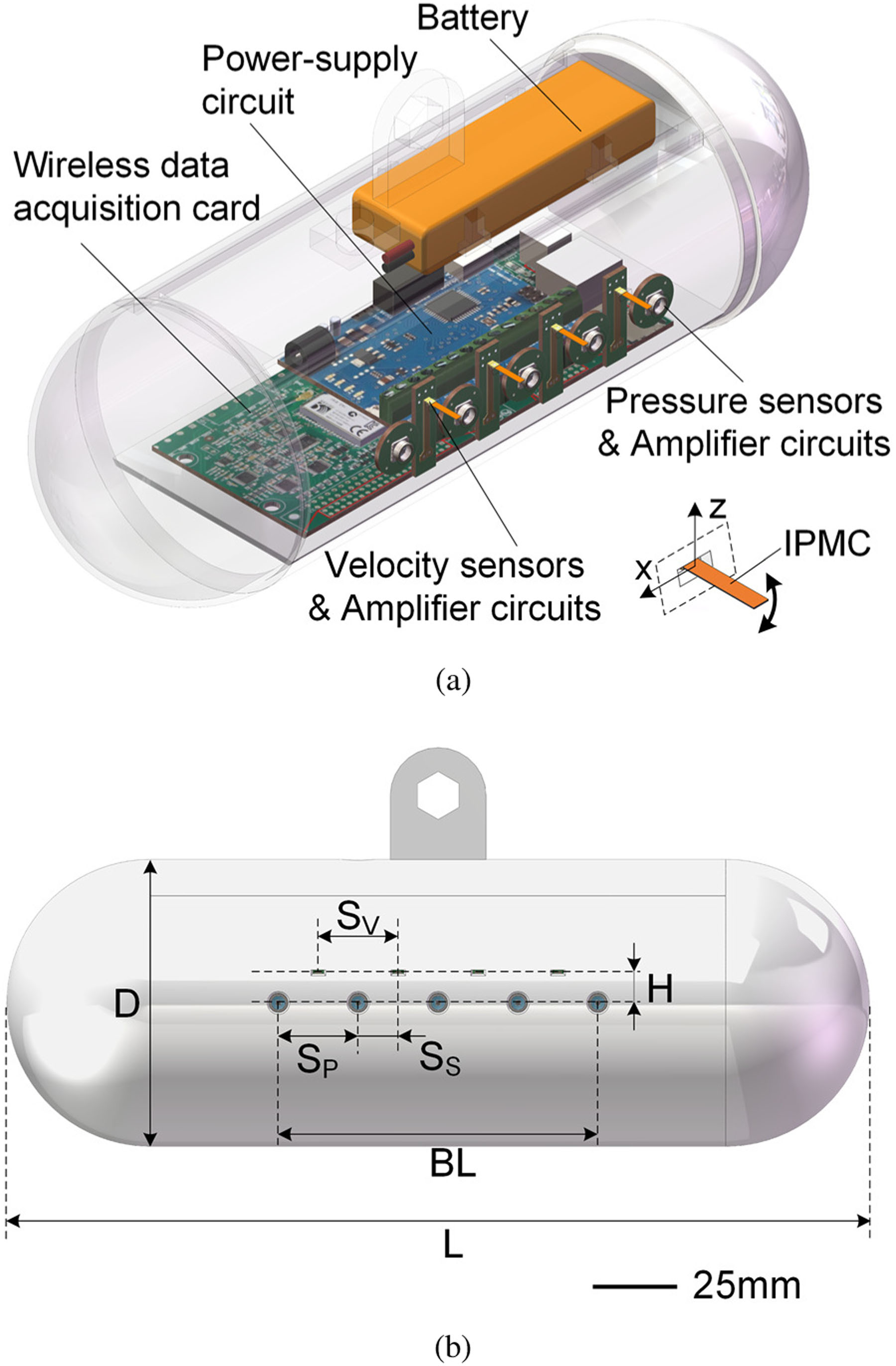
Abstract-I designed and fabricated the first bionic robotic blind fish equipped with an artificial lateral line system integrating pressure and flow velocity sensors. Based on the strategy of maximized hydrodynamic stimulation, an artificial lateral line system fused with differential pressure sensors and hot film flow velocity sensors was designed to help the bionic blind fish sense the flow field. The electrical and software systems of the bionic robotic blind fish were developed to realize sensor data acquisition and remote transmission. Mimicking the intermittent swimming characteristics of blind fish, the bionic robotic blind fish perceived the surrounding environment during gliding, and the hydrodynamic imaging capability of the bionic robotic blind fish was tested by wall detection experiments.
Sensor placement optimization optimization method in 3D model 最大化水动力刺激布局策略
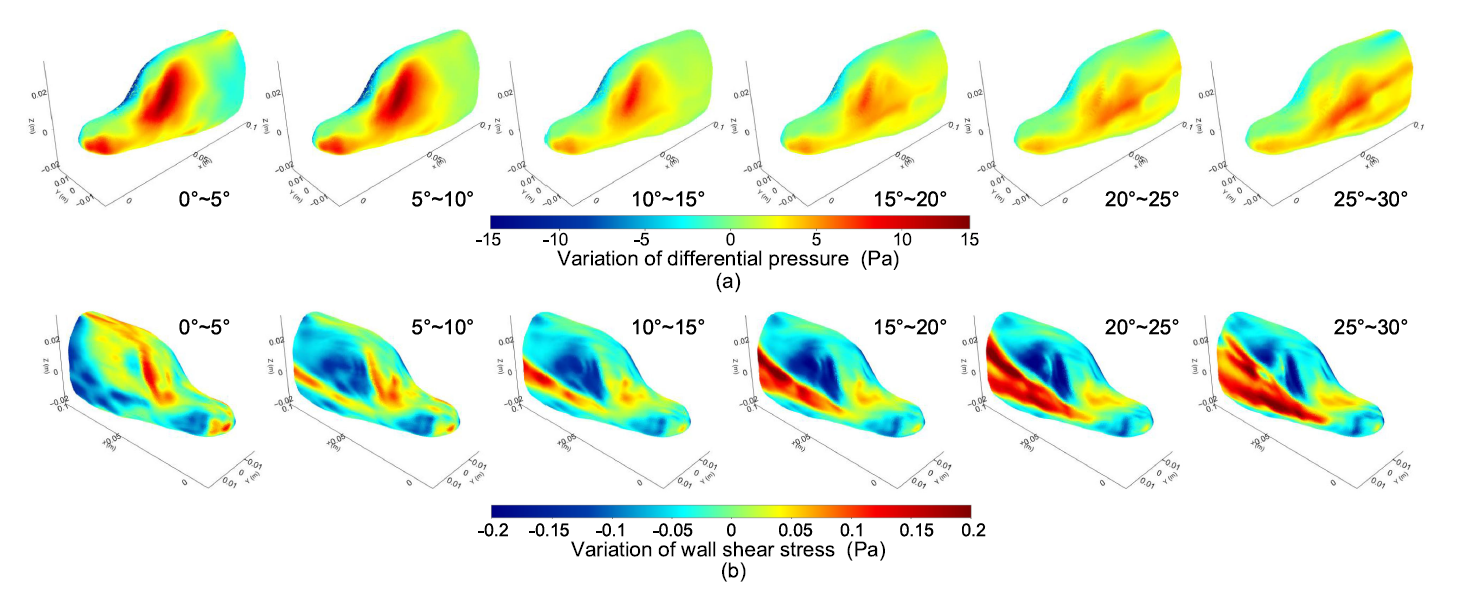
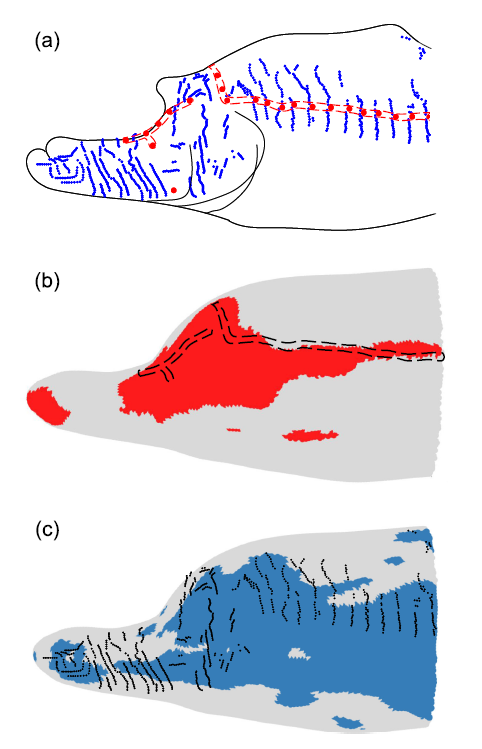
Abstract-Fish can perceive the surrounding flow field using their lateral line systems, consisting of canal neuromasts (CNs) for flow pressure gradient perception and superficial neuromasts (SNs) for flow velocity detection. Although various artificial lateral line (ALL) systems have been developed inspired by the lateral line of fish, few studies have combined both pressure and velocity sensors for hydrodynamic perception, and how to optimize sensor placement remains unanswered, particularly on three-dimensional models. Herein we proposed a maximized hydrodynamic stimulation strategy for sensor placement optimization. We built a fish model and designed an ALL system by mimicking the geometry of a blind cavefish, Sinocyclocheilus tianlinensis. Differential pressure sensors and hot-film flow velocity sensors were used to mimic the CNs and SNs, respectively, with optimized sensor placement. The simulation and experimental results on yaw angle detection suggested that both sensor placement of our ALL system and distribution of the biological lateral line showed good agreement with the maximized hydrodynamic stimulation strategy. Our ALL system could detect a wall within a distance of 0.1 body length, comparable to the perception ability of cave fish. The new sensor placement strategy can be used to equip ALL systems on bionic robotic fish and other underwater vehicles.
基于流场压力流速定位水下三维振动源
Deputy project leader
Abstract-Mimicking fish lateral line for hydrodynamic sensing, various artificial lateral line systems have been developed for underwater robotics. However, previous studies of artificial lateral line systems for underwater source localization were based on a single sensing modality of either pressure or flow velocity. Inspired by the functions of flow and pressure receptors of fish, in this article, we developed an artificial lateral line system integrated with pressure sensors and flow velocity sensors. A dual-sensor fusion modality was proposed to locate near-field dipole source by measuring hydrodynamic signals. A multilayer perceptron neural network was constructed to process the pressure and flow velocity signals and to predict nearfield dipole coordinates in two and three dimensions. In a 2-D plane, compared with a single pressure- or velocitysensing modality, the dual-sensor fusion modality reduced the mean localization error by 30%. In a 3-D space, the mean localization error based on the dual-sensor fusion modality was approximately 0.1 body lengths, when considering a source located within one body length from the artificial lateral line. In addition, we studied the influence of the number of sensors on the localization accuracy via analysis of variance. Our experimental results indicated that the bio-inspired dual-sensor fusion modality is beneficial for improving the performance of artificial lateral line systems for underwater source localization.
Bionic multi-joint rigid-flexible coupling robotic fish 刚柔耦合机器鱼动力学建模
Visiting student in Westlake University.
Use magnets and multi-link mechanisms to mimic the muscles and bones of fish to improve robot fish movement.
基于ROS的自主跟随机器人
国家级大学生创新项目
Group Leader